TECNOLOGIA & ENGENHARIA

RESPONSÁVEIS

Isaque / Sarah / Duda / Henrique
OBJETIVOS E ESTRATÉGIAS
Nossa equipe dividiu as missões em duas etapas. Em sua primeira etapa fazemos as missões do lado direito do tapete, esse esquema se inicia com a missão Maker logo o robô se encaminha para o registro a ser ativado e em seguida ele agarra o lixo orgânico leva-o para o seu local e aperta o botão que se localiza logo ao lado, respectivo à missão dos Nutrientes.
Iniciando a segunda etapa, pegamos o robô, posicionamos-o na base novamente em outra posição para iniciar as missões da parte esquerda do tapete, o robô segue a frente em direção aos legumes levantando suas placas.
Pensando nas missões descritas, na primeira montagem do nosso robô, tivemos como estrutura inicial a sua base e a peça roxa em formato quadrangular corresponde a uma proteção para as rodas.
MONTAGEM DO ROBÔ
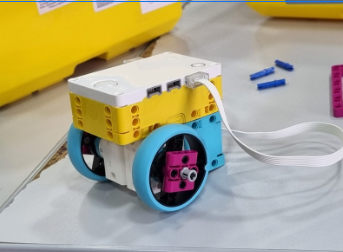
Pensando nas missões descritas, na primeira montagem do nosso robô, tivemos como estrutura inicial a sua base e a peça roxa em formato quadrangular corresponde a uma proteção para as rodas. Utilizamos um motor grande para cada uma das rodas para facilitar a programação e constância de ambas no tapete.
A partir dos dois motores maiores a parte da frente seria uma estrutura base para outro motor que seria usado para a garra e iria auxiliar no movimento do robô, mas após algumas conversas e testes foi visível que teríamos que ampliar sua estrutura frontal para que fosse possível adicionar mais estruturas caso fosse necessário.
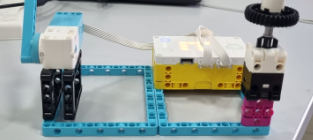
Estrutura inicial para a missão Maker. Optamos por uma estrutura ampliada para não corrermos riscos de a estrutura movimentar-se e sair da posição correta dentro da área delimitada para a Maker. Ampliamos o botão para facilitar o acerto.

A estrutura ao lado é uma das estruturas que adicionamos no robô para seu auxílio em uma das missões, especificamente para a Missão 6 – Lixo Orgânico, onde precisamos recolher o lixo orgânico e levá-lo para o aterro sanitário. Essa estrutura nos apoiou para que a lixeira não se perdesse pelo trajeto. Ela pode servir de auxílio para algumas outras missões.
DIFICULDADES ENCONTRADAS APÓS O TORNEIO INTERNO
Logo após o torneio Interno de robótica no Colégio Ann Mackenzie encontramos diversas dificuldades e adversidades, como desenvolver um bom modelo de robô, concluir com êxito as missões, e, principalmente conseguir ouvir, dialogar e trabalhar em equipe.
Para ampliarmos nossas ideias e melhorias na estrutura e execução do robô, recebemos em uma de nossas reuniões o Miguel, programador da ZOOM que nos auxiliou na construção do robô e nos levou a novas opiniões.

ESTRATÉGIAS DO DESAFIO PRÁTICO
Para o robô decidimos utilizar uma garra extremamente funcional já que, pode fazer diversas missões com uma garra somente sendo elas: Maker, Caixa de Legumes, Lixos recicláveis e Orgânico, Caixas de Nutrientes e Casa de Registro. Outro desafio que tivemos foi a missão dos pratos, que para realizá-la inventamos uma garra inovadora capaz de levar o prato para o local adequado.
Porque usamos rotações? Ao lançar o robô pude observar que uma rotação equivale a 17.5 cm assim podendo calcular mais facilmente a distância percorrida Ao longo do tempo a equipe Alpha aprendeu coisas inimagináveis com a Robótica, deixando nosso caráter cada vez mais aprimorado sabendo resolver desafios com grande maturidade.